Teaching & Training Students for Cognitive Robotics
The field of cognitive robotics has been rapidly advancing in recent years, with the potential to revolutionize various industries such as healthcare, retail, manufacturing, and transportation. As a result, there is an increasing demand for professionals with the knowledge and skills necessary to design, develop, and implement cognitive robotics systems. This demand is where the workshop “Teaching and Training Students for Cognitive Robotics” becomes of utmost importance.
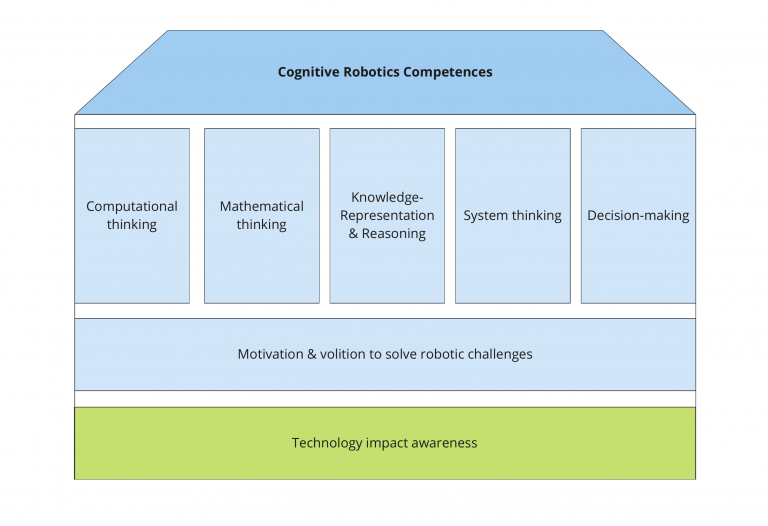
The implementation and design of cognitive robot systems is a challenging process which requires an overview of the physics of robots & their environments, sensors & sensor data, perception, probabilistic state estimation, knowledge representation and reasoning, robot learning, task and motion control, and cognitive architectures. It takes just as much effort to consider these issues when designing robots as it does to teach the entirety of robotics. How can we establish and foster the capabilities to understand the interrelation of constituent system parts and how systems work over time and within the context of larger systems (system thinking), the decomposition, pattern recognition, abstraction, and algorithm design (computational thinking), strategies, processes and abstraction (mathematical thinking), the ability to make reasoned decisions (decision making), the awareness on how technology impacts society (sustainability), and the intrinsic motivation and willingness to solve challenges of robotics (motivation)?
In this workshop, we address this very challenge by systematizing a best practice from experienced teachers and researchers. How is it possible to integrate the needs of all stakeholders? What are the perspectives of students, educators, and researchers, as well as state of the art in cognitive robotics? All of these considerations should also include the demands of society on the subject of cognitive robotics.
Teaching and learning are universal skills that go hand in hand. Both belong to the transversal skills, whether in university education or professional training. Enabling learners to acquire and deepen the necessary skills and abilities is crucial for all those involved in research. The sessions will cover various aspects of cognitive robotics, including perception, reasoning, learning, and decision-making, providing a comprehensive overview of the field. Moreover, the workshop will provide opportunities for networking and collaboration, allowing participants to connect with others in the field and share their experiences and ideas. The exchange of experiences and ideas will facilitate the exchange of knowledge and best practices and foster a community of educators, researchers, and practitioners in cognitive robotics.
To ensure the most comprehensive picture of teaching and learning cognitive robotics, the workshop actively involves the participants. Each session of the workshop is dedicated to a specific question framed by a keynote speech. Based on the previous day, participants will formulate their experiences in groups and then discuss them in plenary.

Invited Speakers | |
|---|---|
|