



About
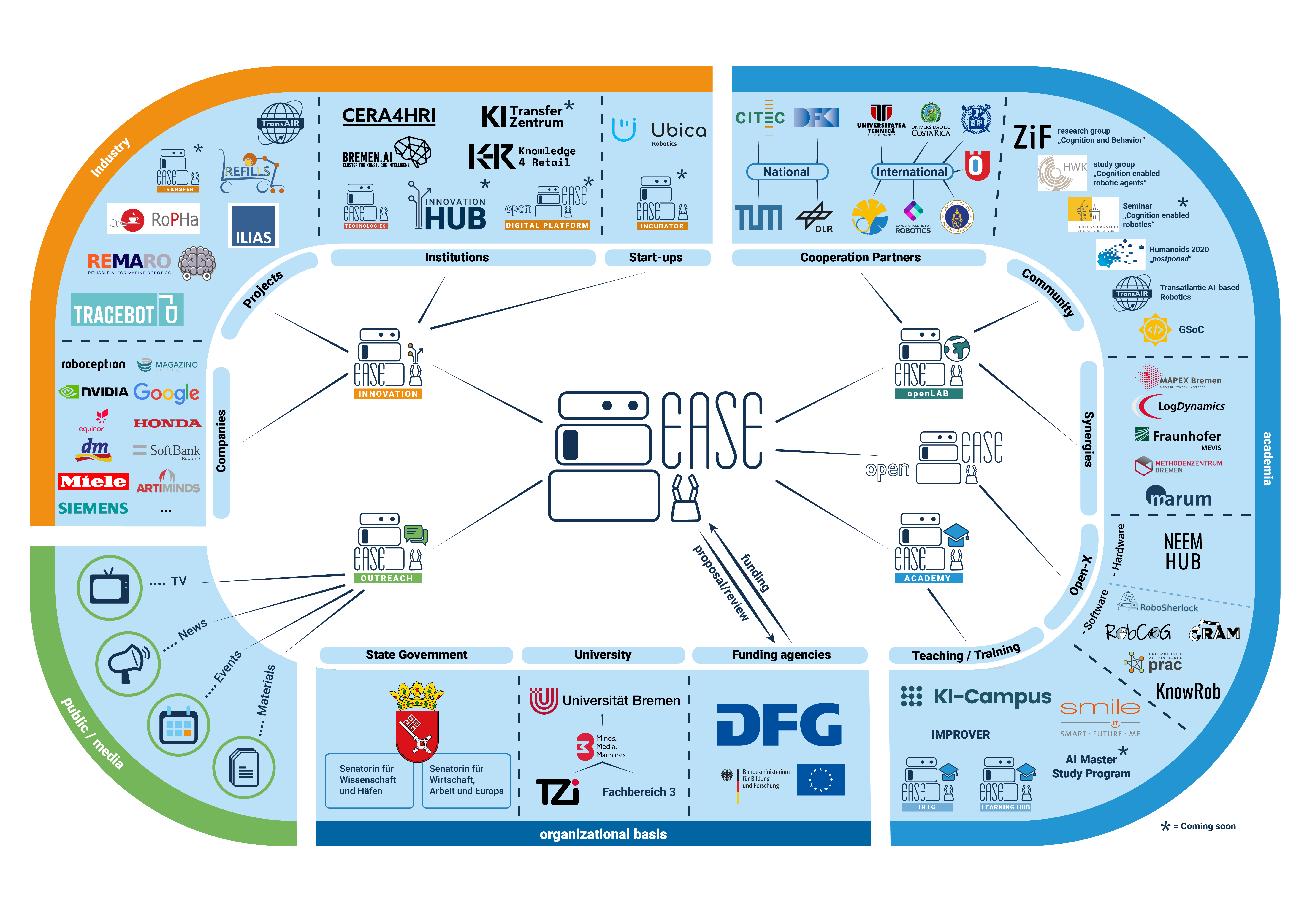
EASE is a Collaborative Research Center (CRC). CRCs are university-based research institutions, established for up to 12 years and funded by the German Research Foundation (DFG). In CRCs, researchers work together within a multidisciplinary research program. EASE started in 2017 and has 16 subprojects, each led by one or multiple researchers.

Research
Everyday Activity Science and Engineering (EASE) is the study of the design, realization, and analysis of information processing models that enable robotic agents – and humans – to master complex manipulation tasks that are mundane and routine, but complex. It also investigates methods of skill and knowledge acquisition.
Community-based approach
We bring together researchers in the fields of artificial intelligence, robotics and cognitive science to allow the synergistic combination and integration of the contributing areas. EASE creates open-source software as well as open knowledge and data.

Milestones
Follow the progress of our research activities and see which milestones have been achieved. You can also take a look at our videos Robot Household Marathon: EASE Generative Models of Everyday Activity or Imagination-enabled Robot Perception on YouTube, a perception system proposed by the CRC EASE.

Publications
The outputs of our research activities are published in highly-ranked journals and conferences. To see a list of our publications, click here.
