Exciting Visit from Senior Citizens at Uni Bremen: Exploring AI and Robotics
On February 26, we had the pleasure of welcoming two groups of senior visitors from Uni Bremen to our lab as part of their campus tour. We were thrilled by…
On February 26, we had the pleasure of welcoming two groups of senior visitors from Uni Bremen to our lab as part of their campus tour. We were thrilled by…
EASE PI Prof. Gordon Cheng (TU Munich) is co-curating a new exhibition titled "Robotic Worlds," now showing at Die Neue Sammlung – The Design Museum in Munich. The exhibition explores…
On Thursday, December 11, we are pleased to welcome Karinne Ramirez-Amaro from Chalmers University of Technology (Sweden) for a talk entitled: “Transparent Robot Decision-Making with Interpretable & Explainable Methods” 📍…
On December 1, Larissa Bolte (Institute for Science and Ethics, University of Bonn) will give a talk on A General-Purpose Introduction to AI Ethics in room 6470, MZH, at 2pm.…
We are excited to share that our latest research paper, titled Everything Robots Need to Know About Cooking Actions: Creating Actionable Knowledge Graphs to Support Robotic Meal Preparation, has been…
Robots acting in real-world environments, such as human households, require a vast amount of various knowledge to be able to execute their tasks. For example, consider the task of setting…

(Avadh Dwivedi, 2017) In recent years, it has been shown that robotic agents are able to generate human-like behavior for everyday tasks such as preparing a meal, or making a…
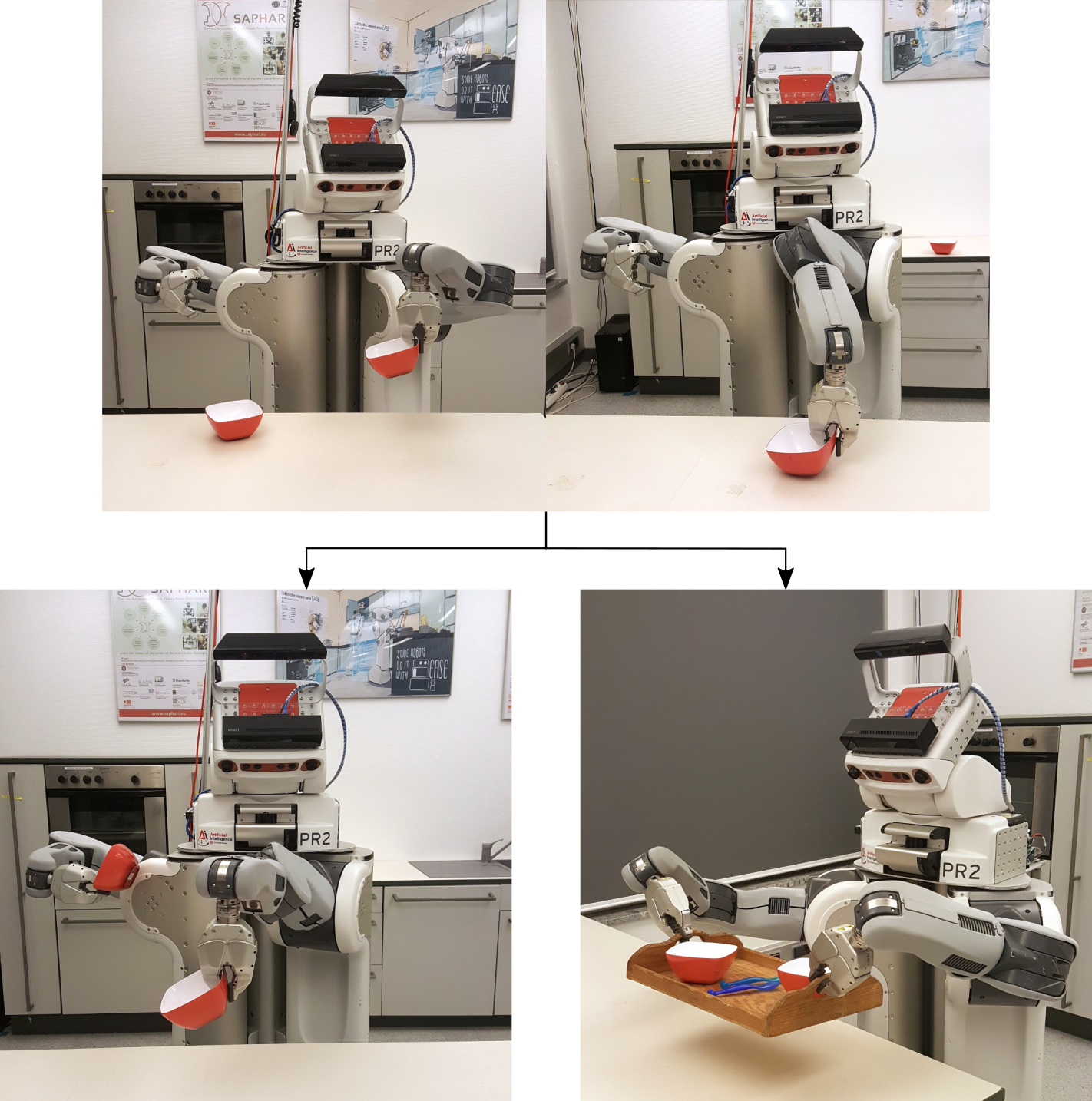
Autogenerated or preprogrammed action plans for robots are not always optimal with respect to the given situation at hand. There may exist opportunities to optimize the behavior of the robot with respect…
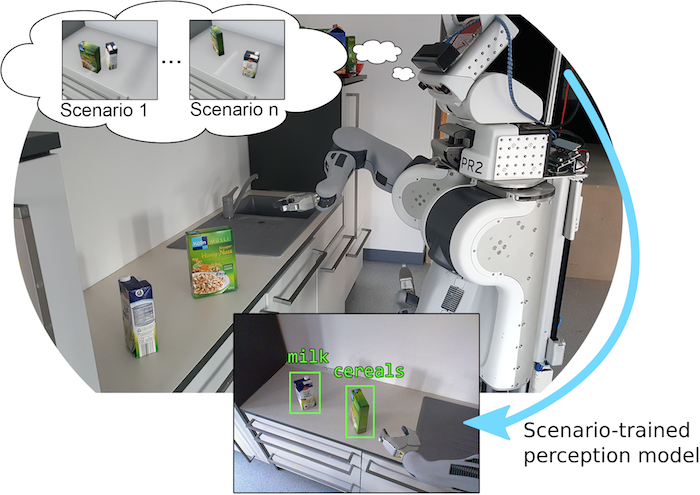
The development of high-performance perception for mobile robotic agents is still challenging. Learning appropriate perception models for everyday activities usually requires extensive amounts of labeled training data that ideally follows…