Successful 3rd Milestone Meeting
On September 30, 2020 the CRC EASE held its third Milestone Meeting via Zoom conference!This year's Milestone Meeting was quite different due to the coronavirus pandemic. The annual meeting is…
On September 30, 2020 the CRC EASE held its third Milestone Meeting via Zoom conference!This year's Milestone Meeting was quite different due to the coronavirus pandemic. The annual meeting is…
We would like to draw your attention to the online conference "Democratize AI with open research" organized by the Institute for Artificial Intelligence (IAI) at Bremen University running from September…
We want to draw your attention to the online conference "Democratize AI with open research" organized by the Institute for Artificial Intelligence at Bremen University. From September 30 to October…
Robots acting in real-world environments, such as human households, require a vast amount of various knowledge to be able to execute their tasks. For example, consider the task of setting…

(Avadh Dwivedi, 2017) In recent years, it has been shown that robotic agents are able to generate human-like behavior for everyday tasks such as preparing a meal, or making a…
Photo Credits: Prof. Tanja Schultz, Uni Bremen The BREMEN BIG DATA CHALLENGE 2020 is finished!This years' challenge was a little different than usual due to the coronavirus. The deadline was…
Introduction There is a fundamental trade-off between the specificity and generality of robot plans. Specific plans are tailored for specific tasks, specific robots, specific objects, and specific environments. They can,…
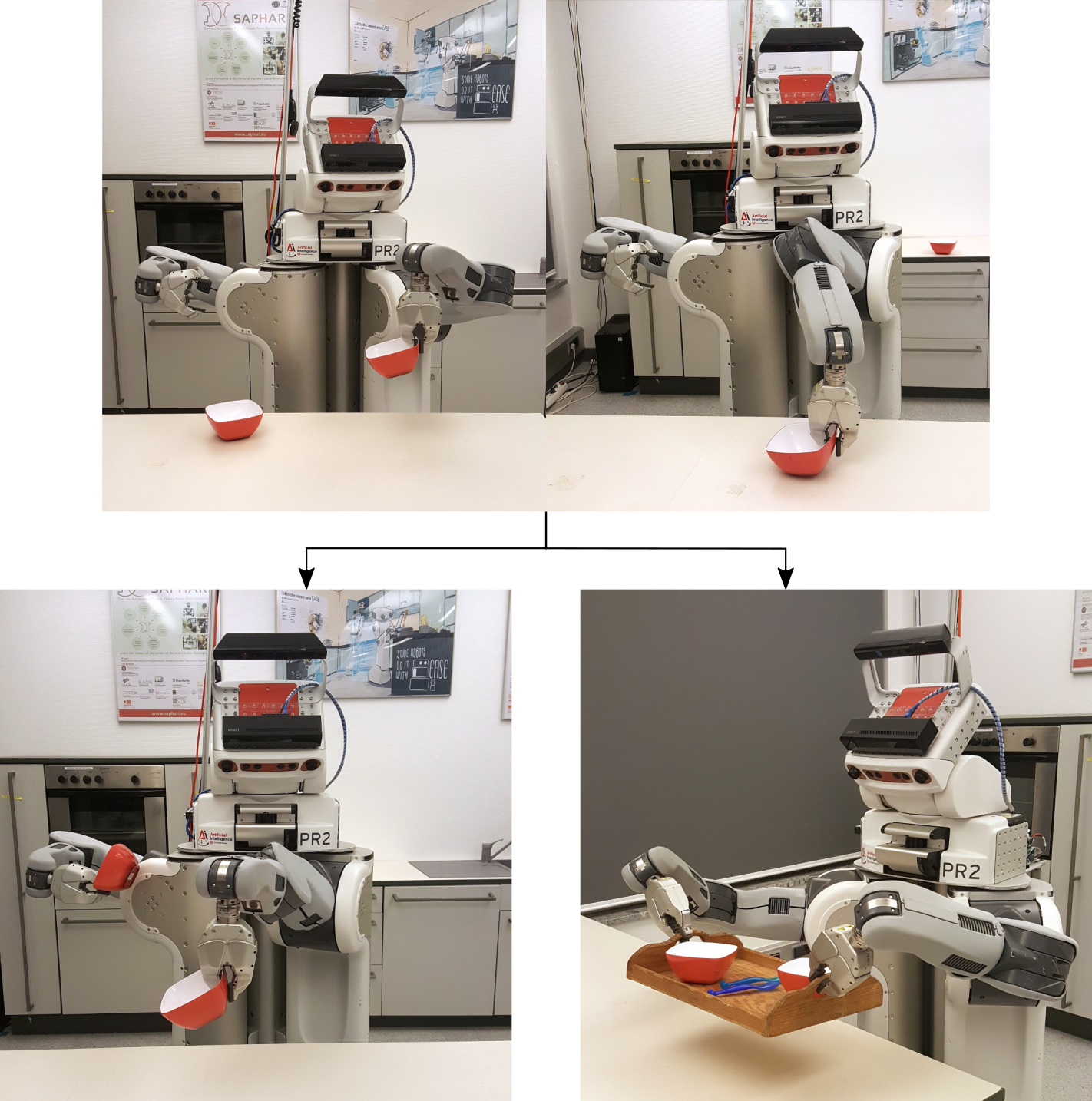
Autogenerated or preprogrammed action plans for robots are not always optimal with respect to the given situation at hand. There may exist opportunities to optimize the behavior of the robot with respect…
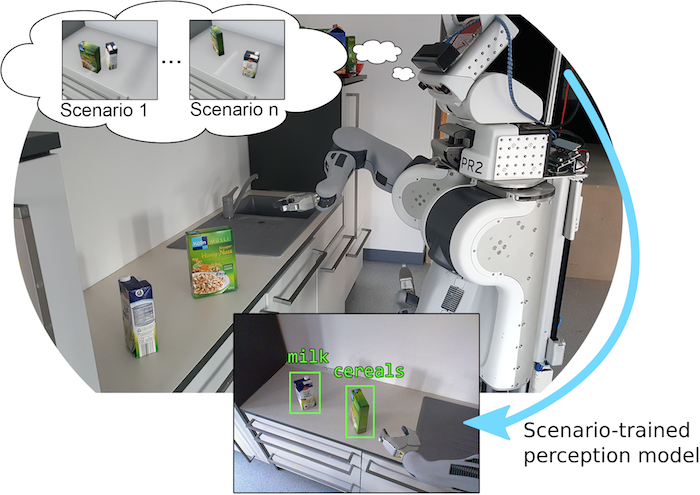
The development of high-performance perception for mobile robotic agents is still challenging. Learning appropriate perception models for everyday activities usually requires extensive amounts of labeled training data that ideally follows…
Am Samstag, 29. Februar 2020, findet im Bremer Haus der Wissenschaft die dritte smile Expo statt. Schülerinnen stellen smarte Dinge vor, die sie in den vergangenen drei Jahren in Workshops…